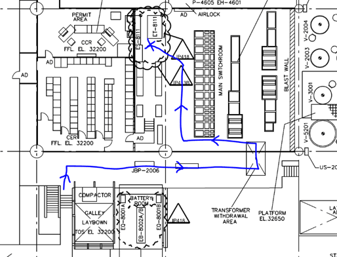
Imagine the following case: A piece of equipment ( e.g. a Transformer ) has to be installed in the furthest corner of the platform in a room. Several hours are spent rigging the piece of equipment down into the furthest corner. The piece of equipment does not fit through the furthest door and modification is needed, 2 solutions are proposed:
- Cut a hole in the door and reinstate after installation
- Rig equipment back up and modify equipment to fit the door opening
Both solutions adds a cost of either an additional several hours of rigging back to modify the equipment or several hours to modify the wall/doors.
Both solutions present a challenge due to extra scope, costs, and time.
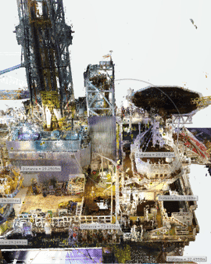
Our colleague came up with the idea that we at Semco Maritime utilize the 3D scan library for space management / rigging tasks. With that, we have developed a software that checks the final position as well as leading the entire path leading up to it in a safe and efficient manner. Further, the project has now ensured a faster check during engineering / planning phase given that it is all automized.